Сервопривод, сервомотор, серва это штука которую можно заставить повернуться на некоторый угол. Пока что хватит и такого определения, в конце будет подробней.
У сервы 3 вывода: Питание, земля и сигнальный провод.

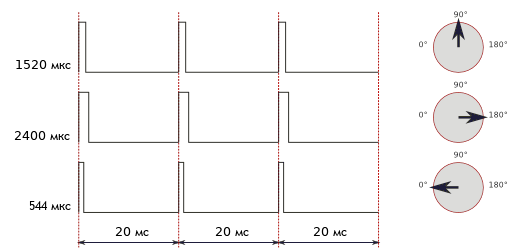
С помощью сигнального провода сервопривод определяет на какой угол нужно повернуться.
Сюда подаются импульсы одинаковой частоты, но разной ширины (длительности).
Чаще всего частота сигнальных импульсов 50 Гц (Период = 20 мс).При этом ширина минимального импульса 1 мс, а максимального 2 мс.
Этого должно хватить для начала, дальше будет подробней (можно не читать).
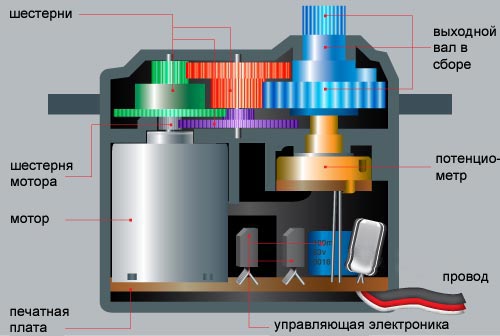
Выходной вал соединён с переменным резистором который и определяет угол поворота.
Потенциометр соединён с плюсом и землей по крайним выводам, а средний подключается к управляющей схеме. Получается делитель напряжения.
Подавая управляющий сигнал мы говорим к примеру что должно быть 5 вольт, плата проверяет потенциометр а там 0 значит 0 градусов и т.к. напряжение на резисторе меньше чем должно быть, управляющая плата включает мотор, который крутиться по часовой стрелке до тех пор пока напряжение на потенциометре не станет равно нужному нам.
То есть управляющая плата сравнивает заданный нами управляющий сигнал со значением напряжения на потенциометре (по своим формулам), если на потенциометре меньше чем нужно он крутиться по часовой стрелке, если меньше против часовой, до тех пор пока значения не будут равны.
Нейтральное положение это состояние сервопривода когда управляющий сигнал равен половине от суммы максимального и минимального сигнала.
То есть если минимальная ширина сигнала 1 мс а максимальная 2 мс, то нейтральное положение будет когда сигнал имеет длину 1.5 мс. Обычно в этом состоянии угол равен 90 градусов.
Мотор часто имеет большую скорость вращения, но слабый крутящий момент - не может поднимать тяжелые грузы. Из-за этого используют редуктор, это сборка шестерёнок которые преобразуют высокую скорость оборота мотора в медленную, но сильную скорость оборота выходного вала.
Стоит отметить что для их управления используется не PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). А — PDM (Pulse Density Modulation).
Теперь остались только характеристики сервоприводов и их отличия друг от друга.
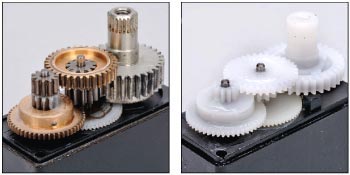
Шестерни для сервоприводов бывают из разных материалов:


Привод — совокупность устройств, предназначенных для приведения в действие машин. Состоит из двигателя, трансмиссии и системы управления.
Двигатель (мотор) — устройство, преобразующее какой-либо вид энергии в механическую.
Трансмиссия — совокупность сборочных единиц и механизмов, соединяющих двигатель (мотор) с ведущими колёсами транспортного средства (автомобиля) или рабочим органом станка. В общем случае трансмиссия предназначена для передачи крутящего момента от двигателя к колёсам (рабочему органу), изменения тяговых усилий, скоростей и направления движения.
Система управления — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение.
Информация взята отсюда:
zelectro.com.ua
avmodels.ru
rc-auto.ru
wiki.amperka.ru
Wikipedia
wikipedia.org
Как с ним работать
У сервы 3 вывода: Питание, земля и сигнальный провод.
С помощью сигнального провода сервопривод определяет на какой угол нужно повернуться.
Сюда подаются импульсы одинаковой частоты, но разной ширины (длительности).
Чаще всего частота сигнальных импульсов 50 Гц (Период = 20 мс).При этом ширина минимального импульса 1 мс, а максимального 2 мс.
Этого должно хватить для начала, дальше будет подробней (можно не читать).
Устройство сервопривода
Выходной вал соединён с переменным резистором который и определяет угол поворота.
Потенциометр соединён с плюсом и землей по крайним выводам, а средний подключается к управляющей схеме. Получается делитель напряжения.
Подавая управляющий сигнал мы говорим к примеру что должно быть 5 вольт, плата проверяет потенциометр а там 0 значит 0 градусов и т.к. напряжение на резисторе меньше чем должно быть, управляющая плата включает мотор, который крутиться по часовой стрелке до тех пор пока напряжение на потенциометре не станет равно нужному нам.
То есть управляющая плата сравнивает заданный нами управляющий сигнал со значением напряжения на потенциометре (по своим формулам), если на потенциометре меньше чем нужно он крутиться по часовой стрелке, если меньше против часовой, до тех пор пока значения не будут равны.
Нейтральное положение это состояние сервопривода когда управляющий сигнал равен половине от суммы максимального и минимального сигнала.
То есть если минимальная ширина сигнала 1 мс а максимальная 2 мс, то нейтральное положение будет когда сигнал имеет длину 1.5 мс. Обычно в этом состоянии угол равен 90 градусов.
Мотор часто имеет большую скорость вращения, но слабый крутящий момент - не может поднимать тяжелые грузы. Из-за этого используют редуктор, это сборка шестерёнок которые преобразуют высокую скорость оборота мотора в медленную, но сильную скорость оборота выходного вала.
Стоит отметить что для их управления используется не PWM/ШИМ (Pulse Width Modulation) или PPM (Pulse Position Modulation). А — PDM (Pulse Density Modulation).
Теперь остались только характеристики сервоприводов и их отличия друг от друга.
Характеристики
Момент / Крутящий момент / Сила поворота
Указывают для 2 значений напряжения 4.8 В и 6 В. Показывает какой груз серва может выдержать в неподвижном состоянии. Момент в 15 кг/см означает что сервопривод способен удержать неподвижно рычаг в 1 см и подвешенным к нему грузом массой 15 кг либо же удержать груз в 1 кг на рычаге в 15 см.
Скорость поворота
Скорость сервоприводов измеряется временем поворота рычага сервопривода на угол 60 градусов при напряжении питания 4.8 В и 6 В. Например, сервопривод с параметром 0.06с/60° поворачивает вал на 60 градусов за 0.06с.
Форм фактор / Размер
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов. Их можно разделить на:
Микро: 24мм x 12мм x 24мм, вес: 8-10 г.
Мини: 30мм x 15мм x 35мм, вес 23-25 г.
Стандарт: 40мм x 20мм x 37мм, вес: 50-80 г.
Гигант: 49мм x 25мм x 40мм, вес 50-90 г.
Тип редуктора / Материалы шестерней
пластиковые, карбоновые и металлические.
Пластиковые самые дешевые, легкие, не прочные, остальные 2 прочнее, дороже, крепче.
Выходной вал скользит с помощью подшипников, шариковые используются в мощным сервах, но со временем появляется люфт.
Виды моторов
Мотор с сердечником самый обычный мотор постоянного тока с проволочной обмоткой из проволоки по центру (крутиться) и постоянными магнитами по бокам (крутиться).
Вибрирует, медленно разгоняется и останавливается.
Мотор без сердечника Постоянный магнит в центре (неподвижен) и обмотка вокруг в форме цилиндра (крутиться).
Нет недостатков как у мотора с сердечником, но дороже.
Еще есть сервы с бесколлекторным мотором, они лучше и дороже остальных. Но не распространены.
Аналоговые и Цифровые
У цифровых есть микропроцессор, они работают на большой частоте из-за этого улучшается точность и пропадают мертвые зоны. Но он потребляет больше тока и дороже.
Мертвые зоны происходят при малом отклонении сервопривода, на мотор подается слабый сигнал и он не способен вернуть серву в прежнее состояние, чем больше отклонение тем сильнее сигнал, так что далеко он не покрутиться, но погрешность всё же есть.
Для общего образования
Привод — совокупность устройств, предназначенных для приведения в действие машин. Состоит из двигателя, трансмиссии и системы управления.
Двигатель (мотор) — устройство, преобразующее какой-либо вид энергии в механическую.
Трансмиссия — совокупность сборочных единиц и механизмов, соединяющих двигатель (мотор) с ведущими колёсами транспортного средства (автомобиля) или рабочим органом станка. В общем случае трансмиссия предназначена для передачи крутящего момента от двигателя к колёсам (рабочему органу), изменения тяговых усилий, скоростей и направления движения.
Система управления — систематизированный (строго определённый) набор средств сбора сведений о подконтрольном объекте и средств воздействия на его поведение.
Информация взята отсюда:
zelectro.com.ua
avmodels.ru
rc-auto.ru
wiki.amperka.ru
Wikipedia
wikipedia.org


Комментариев нет :
Отправить комментарий